与时俱进,诚赢客户
十年散热器、离心风机、压缩机制造厂家
全国服务热线400-123-4567
MPPT,即MaximumPowerPointTracking的简称,中文为“最大功率点跟踪”,这个词在光伏行业中出现频率非常高,光伏相关的电力电子设备如光伏逆变器,光伏优化器均支持MPPT,他的主要作用是调节光伏电池组件的工作点,始终令光伏组件输出最大功率。
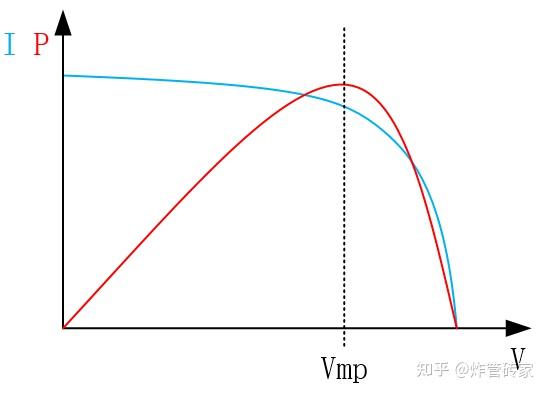
下图是典型的光伏组件输出特性曲线,其中蓝色为I-V曲线,红色为P-V曲线:
为了简单分析,我们假设光伏组件直接接恒流负载,由于负载电流固定,组件的工作点也就固定无法改变,无法输出最大功率:
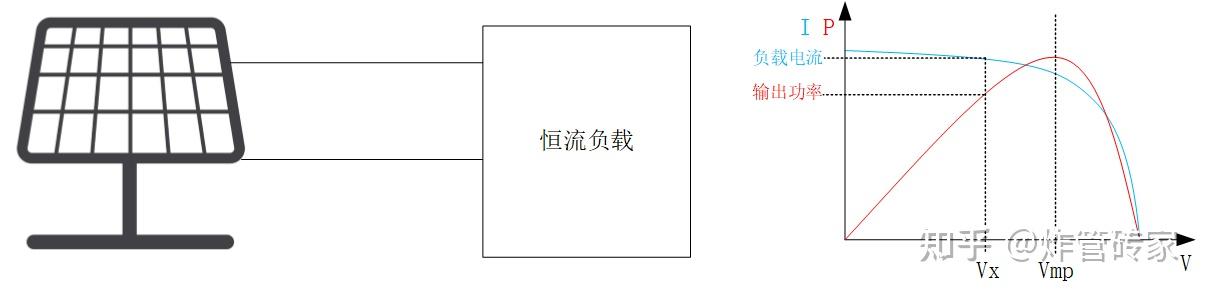
现在,我们将光伏组件接上优化器(实际上一种是DC/DC变换器),假如优化器为BUCK拓扑,占空比范围为0~100%。

当占空比100%,效果等同于直连负载,负载电压为Vx,组件输出电压也是Vx;
当占空比为0时,效果等同于组件与负载完全断开,负载电压为0V,组件输出电压为Voc;
优化器有能力将组件电压在Vx~Voc之间调节,当调节到Vmp 时,即工作在最大功率点,这种能力也就是MPPT。
需要注意的时,当负载电流太小,导致Vx处于Vmp右边时,优化器无法将组件电压调节至Vmp,因为它的调节范围为Vx~Voc。
相信大家能在网上搜索到很多种最大功率跟踪的方法,为了便于大家理解入门,本文仅着重介绍两种方法:扰动观测法和它的进阶版双向扰动法,这两种方法都要求变换器本身有控制输入电压的能力。
此方法简单来说,就是令光伏组件输入电压往某个方向扰动(变化一小步,比如增大或减小0.3V),然后观察扰动前后的功率差值,如果功率变大,那么说明扰动方向正确,继续扰动即可;如果功率变小,说明扰动方向错误,需要改变扰动方向,以下为此方法的示意图,扰动观测法的工作情况可以分为A B C三种,分别对应P-V曲线的左坡、右坡、峰顶。
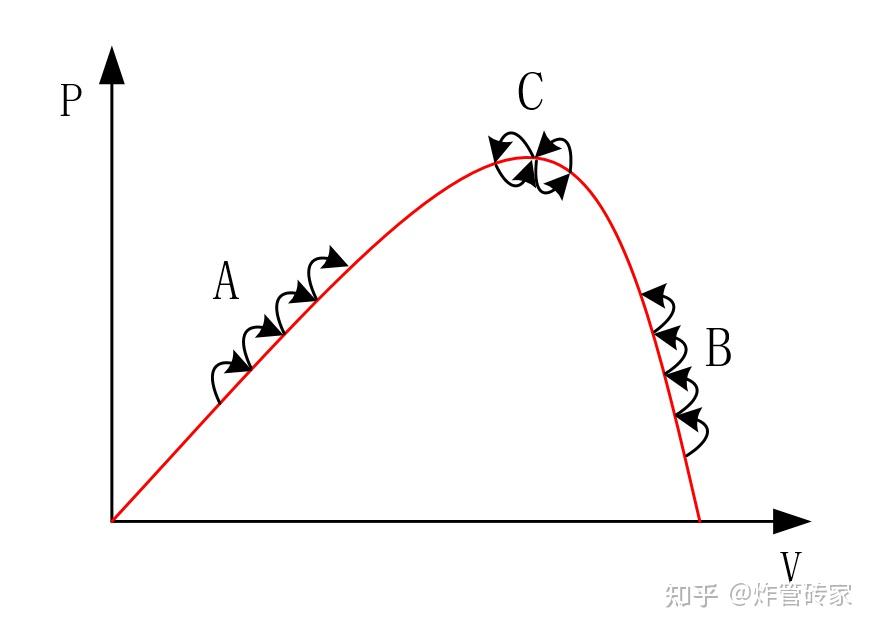
扰动观测法具有逻辑简单,算法容易实现的优点,但这种方法存在一定局限性:在光照强度变化的情况下,算法判断功率变化时可能会出错,扰动往错误的方向走。
下面来分析下这种情况,我们知道光伏组件的P-V曲线随着光照强度变化,呈现如下图的变化趋势,即使不对输入电压做扰动,光伏组件输出功率也会产生变化。
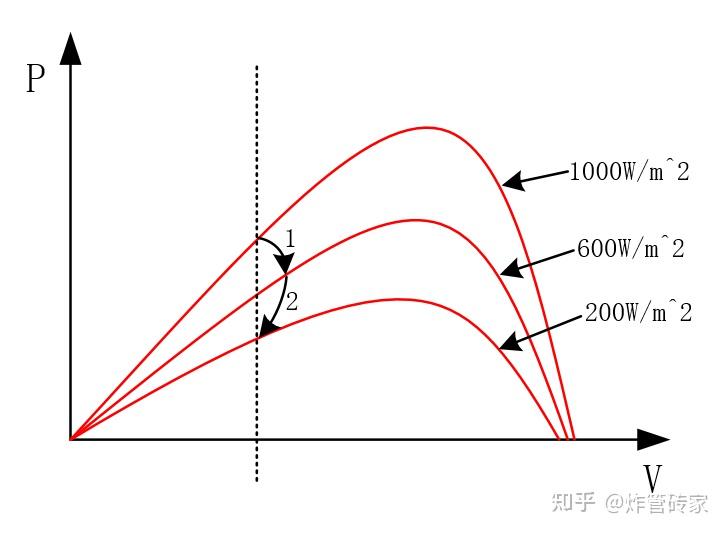
我们假设光照快速减弱,下图种第1步扰动,受到光照减弱影响,扰动过后功率变小,算法会误以为扰动方向错误,从而选择错误的方向执行第2步扰动。
双向扰动法可以消除上述光照变化对扰动观测的影响,让MPPT即使在光照变化时,也能准确判断正确的扰动方向,首先来分析光照变化时,每一步扰动的对应的功率具体是如何变化的。
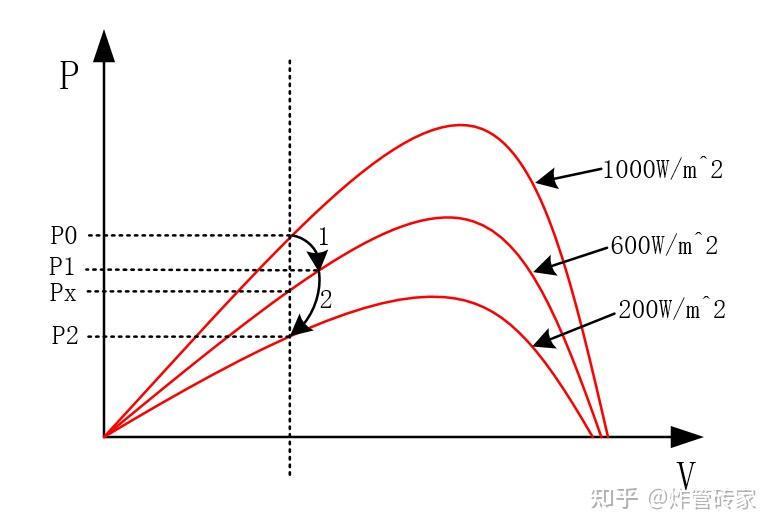
首先看扰动1,计算这一步扰动的功率变化:
不能直接作为判断依据,它包含的光照变化和扰动引起的两部分功率变化,
光照变化引起的功率为:
扰动引起的功率变化为:
可以被作为扰动观测的判断判断,但是由于
是未知的,无法直接求出
。
我们观察到光照变化时,这个点我们无法通过扰动到达,但是可以通过往回扰动一步到达
。
可以认为是
和
的之间的中点,故有:
最后可以求得:
最终只需要判断的正负既可以判断扰动方向,简单概括下来,双向扰动法的核心分为3个步骤:
1、往某一个方向扰动,记录本次扰动的功率变化 。
2、往1的相反方向扰动一步,记录本次扰动的功率变化 。
3、如果 ,说明第1步的方向正确,再次按照第1步方向扰动回去;相反,则第2步扰动方向正确,本次扰动结束。
未完。。。